Distributed Motion Controller for Complex Robotic Manipulators

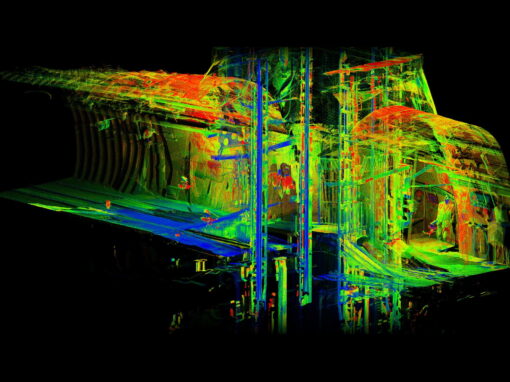
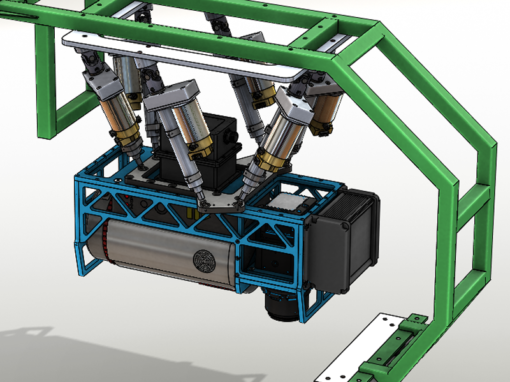
The Airborne LiDAR Stabilization that we’ve designed is a Stewart Platform-based robot optimized to get the highest possible compensation range in the limited space of a small aircraft cabin. The crucial aspect of parallel robot control is a synchronous operation of all actuators. Any skew or failure can change the motion trajectory. As the robot workspace is very constrained, even a small inaccuracy can result in a collision of the delicate optical instruments with an aircraft’s parts causing serious damage.
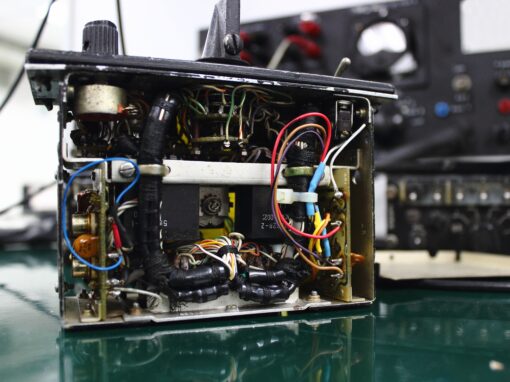
To address the potential risks we’ve designed a custom Distributed Motion Controller. The system has a single main controller and multiple actuator controllers. The main controller uses IMU to determine the current autogyro orientation, processes the robot kinematics and calculates the trajectory for all actuators. It also manages actuators’ drivers and supervises their synchronous operation.
The devices communicate using CAN and have built-in custom fail-safe mechanisms. When any of the system’s components fail the others freeze instantly. It prevents motion along unexpected trajectories and damage of expensive optical instruments.
We chose Rainlabs because they were able to provide a solution to overcome the complexity of factors impacting our unique product. They were able to address the numerous challenges encountered in all design process stages and provide solutions that meet our needs.
OUR CASE STUDIES













Free Consultation
If you:
- Have a problem and don’t know how to solve it
- Have an idea and need a technical advice
- Don’t know how to kick-off your project
- Wonder if IoT and new technologies can help your business
- Want to upgrade your products
- Are not satisfied with off-the-shelf solutions because don’t meet your requirements
- Have any other question and suspect that we know the answer
Please fill out the form and we will contact you to schedule a consultation.
The consultation is free of charge, no strings attached.
By submitting your data, you agree to the Privacy Policy of Rainlabs Services.
+48 512 094 494
Jakub Tutro
Rainlabs S.C.
Rainlabs Services Sp. z o.o.
Rainlabs Services Spółka z ograniczoną odpowiedzialnością z siedzibą w Krakowie, ul. Jana Zamoyskiego 24, 30-519 Kraków, wpisana do rejestru przedsiębiorców Krajowego Rejestru Sądowego prowadzonego przez Sąd Rejonowy dla Krakowa-Śródmieścia w Krakowie, XI Wydział Gospodarczy Krajowego Rejestru Sądowego pod numerem KRS 0000908997, NIP 6793219474, kapitał zakładowy w wysokości 100 000 złotych (wpłacony w całości).